Tactile Sensing and Machine Learning for Human and Object Recognition in Disaster Scenarios
Abstract
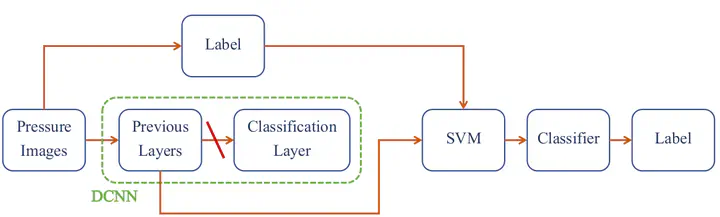
This paper presents the application of machine learning to tactile sensing for rescue robotics. Disaster situations often exhibit low-visibility scenarios where haptic feedback provides a valuable information for the search of potential victims. To extract haptic information from the environment, a tactile sensor attached to a lightweight robotic arm is used. Then, methods based on the SURF descriptor, support vector machines (SVM), Deep Convolutional Neural Networks (DCNN) and transfer learning are implemented to classify the data. Besides, experiments have been carried out, to compare those procedures, using different contact elements, such as human parts and objects that could be found in catastrophe scenarios. The best achieved accuracy of 92.22%, results from the application of the transfer learning procedure using a pre-trained DCNN and fine-tuning the classification layer of the network.
Type
Publication
Third Iberian Robotics Conference. Advances in Intelligent Systems and Computing