Grasping Angle Estimation of Human Forearm with Underactuated Grippers Using Proprioceptive Feedback
Abstract
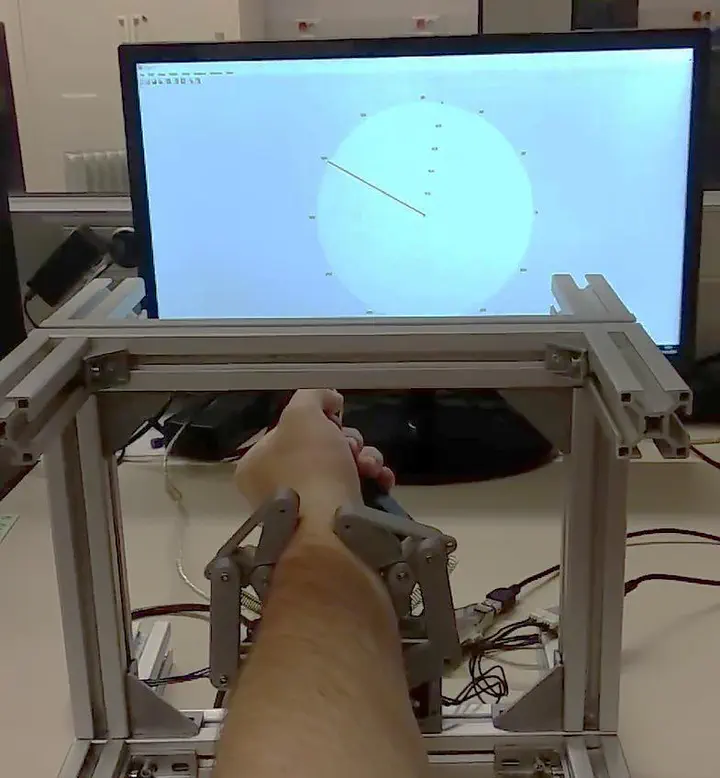
In this paper, a method for the estimation of the angle of grasping of a human forearm, when grasped by a robot with an underactuated gripper, using proprioceptive information only, is presented. Knowing the angle around the forearm’s axis (i.e. roll angle) is key for the safe manipulation of the human limb and biomedical sensor placement among others. The adaptive gripper has two independent underactuated fingers with two phalanges and a single actuator each. The final joint position of the gripper provides information related to the shape of the grasped object without the need for external contact or force sensors. Regression methods to estimate the roll angle of the grasping have been trained with forearm grasping information from different humans at each angular position. The results show that it is possible to accurately estimate the rolling angle of the human arm, for trained and unknown people.
Type
Publication
Fourth Iberian Robotics Conference. Advances in Intelligent Systems and Computing