Abstract
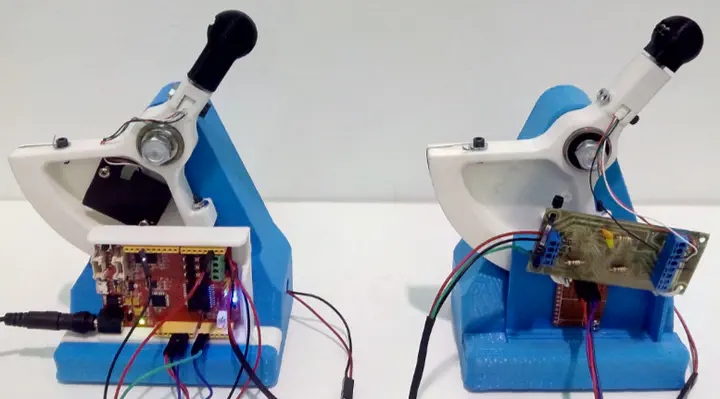
This paper presents the use of 1 DoF force feedback devices as a tool for the development of teaching applications in teleoperation and telerobotics subjects, with the aim of providing a physical interface that can be used as practice equipment. These devices, known as haptic paddle, have already been successfully tested for educational applications of dynamic systems modeling and simulation, introduction to haptics and control engineering in several universities. For the development of the experiments shown in this article, two haptic paddle devices have been used with an Arduino-based controller and fabricated using additive 3D printing technologies. Thanks to the built-in force and position sensors, bilateral position-position and force-position teleoperation schemes can be implemented.
Type
Publication
In XXXVII Jornadas de Automatica 2016