Cinematica y prototipado de un manipulador paralelo con centro de rotacion remoto para robotica quirurgica
Abstract
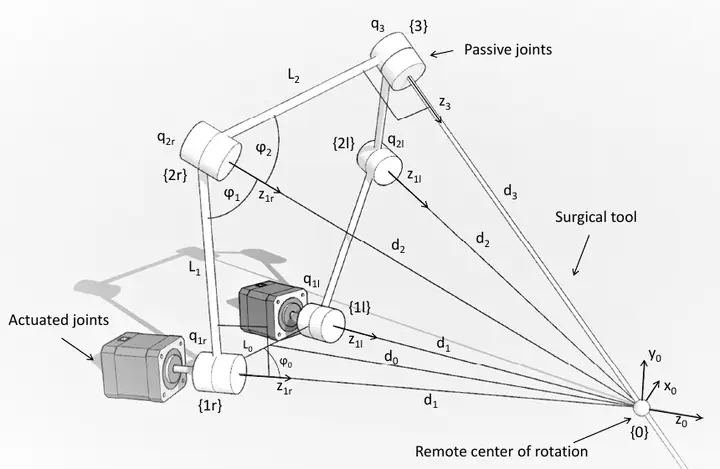
This paper presents the kinematic model of a parallel robot and the construction of a prototype with 2 DoFs, whose purpose is to serve as an instrument positioner for laparoscopic surgical interventions. The robot has a parallel configuration, with a five-bar mechanism structure with non-parallel axes, and two active joints. The particularity of this mechanism lies in its non-planar shape, i.e. the axes of the robot joints are not in the same plane, but their extensions intersect at a remote point, on which the terminal element of the manipulator pivots. The working space of this prototype is a spherical cap with center at the patient entry port. Since it is not an open-chain manipulator, its kinematics are complex. This paper also includes a geometric inverse kinematic model for control the robot in spherical coordinates, and its validation through the construction of a prototype.
Type
Publication
In XXXVIII Jornadas de Automatica 2017