Methods for Autonomous Wristband Placement with a Search-and-Rescue Aerial Manipulator
Abstract
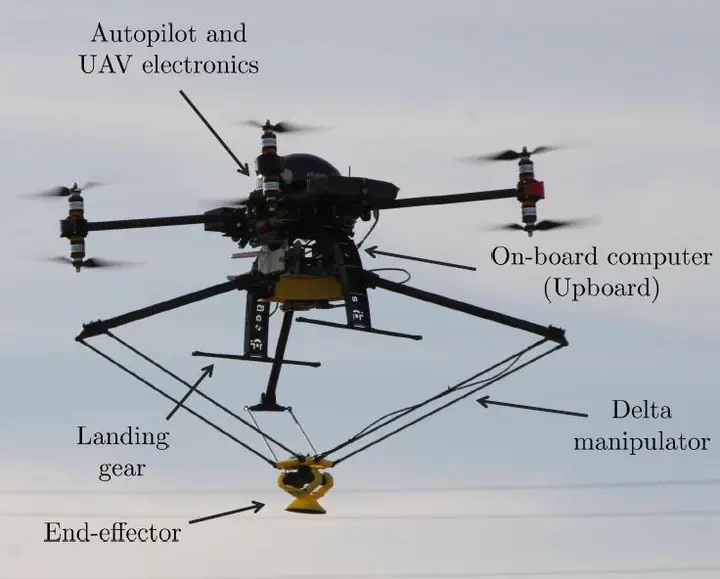
A new robotic system for Search And Rescue (SAR) operations based on the automatic wristband placement on the victims’ arm, which may provide identification, beaconing and remote sensor readings for continuous health monitoring. This paper focuses on the development of the automatic target localization and the device placement using an unmanned aerial manipulator. The automatic wrist detection and localization system uses an RGB-D camera and a convolutional neural network based on the region faster method (Faster R-CNN). A lightweight parallel delta manipulator with a large workspace has been built, and a new design of a wristband in the form of a passive detachable gripper, is presented, which under contact, automatically attaches to the human, while disengages from the manipulator. A new trajectory planning method has been used to minimize the torques caused by the external forces during contact, which cause attitude perturbations. Experiments have been done to evaluate the machine learning method for detection and location, and for the assessment of the performance of the trajectory planning method. The results show how the VGG-16 neural network provides a detection accuracy of 67.99%. Moreover, simulation experiments have been done to show that the new trajectories minimize the perturbations to the aerial platform.
Type
Publication
In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2018