Diseño de una pinza subactuada híbrida soft-rigid con sensores hápticos para interacción física segura robot-humano
Abstract
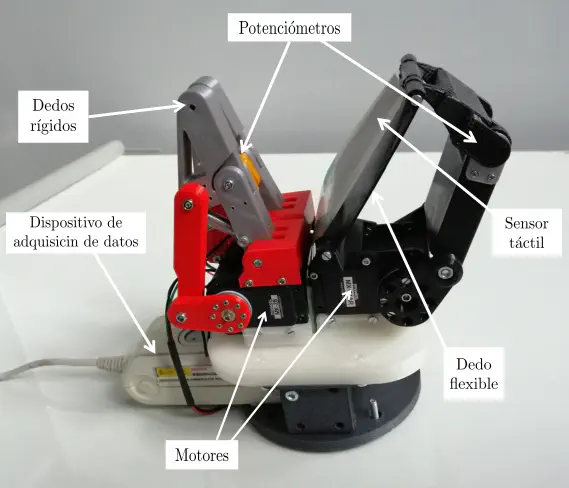
Underactuated robotic hands or grippers is one of the greatest achievements in robotic manipulation of the last years due to the adaptability to grasp objects with different shape, size and stiffness. On the other hand, the development of soft robots for intrinsically safe physical Human-Robot Interaction (pHRI) has also become one of the most important topics in robotics in the last decade. However, it is hard to find works that integrates both concept in one gripper. In this work, a new gripper with two underactuated fingers and one flexible is presented. Furtheremore, the flexible finger integrates a high-resolution tactile sensor, so that the robot have the information of pressure distributions while grasping an object. Furtheremore, two different flexible fingers made of different materials are compared in terms of flexibility and pressure distribution when grasping a human forearm.
Type
Publication
In XL Jornadas de Automática 2019