An Open Tele-Impedance Framework to Generate Data for Contact-Rich Tasks in Robotic Manipulation
Abstract
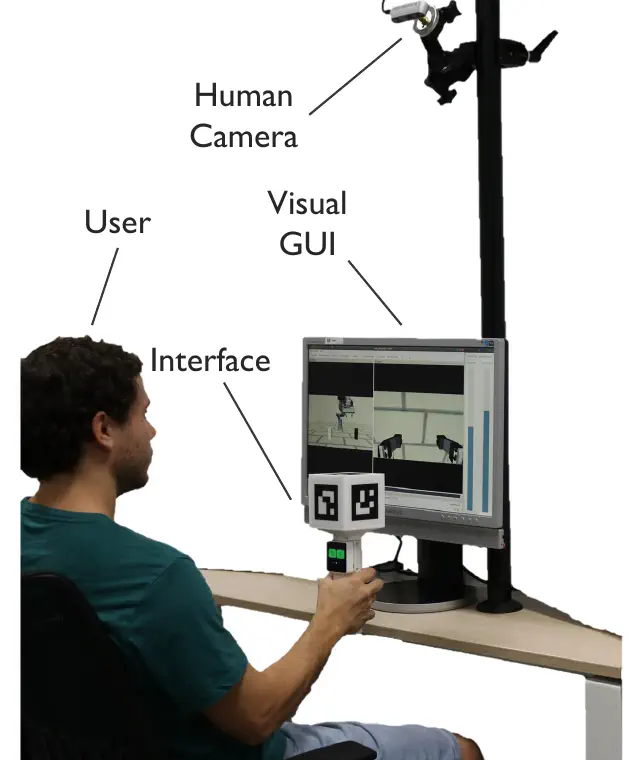
Using large datasets in machine learning has led to outstanding results, in some cases outperforming humans in tasks that were believed impossible for machines. However, achieving human-level performance when dealing with physically interactive tasks, e.g., in contact-rich robotic manipulation, is still a big challenge. It is well known that regulating the Cartesian impedance for such operations is of utmost importance for their successful execution. Approaches like Reinforcement Learning (RL) can be a promising paradigm for solving such problems. More precisely, approaches that use task-agnostic expert demonstrations to bootstrap learning when solving new tasks have a huge potential since they can exploit large datasets. However, existing data collection systems are expensive, complex, or do not allow for impedance regulation. This work represents a first step towards a data collection framework suitable for collecting large datasets of impedance-based expert demonstrations compatible with the RL problem formulation, where a novel action space, namely Variable Impedance Control in End-effector Space (VICES), is used. The framework is designed according to requirements acquired after an extensive analysis of available data collection frameworks for robotics manipulation. The result is a low-cost and open-access tele-impedance framework which makes human experts capable of demonstrating contact-rich tasks.
Type
Publication
In IEEE International Conference on Advanced Robotics and Its Social Impacts (ARSO) 2023