Proprioceptive estimation of forces using underactuated fingers for Robot-Initiated pHRI
Abstract
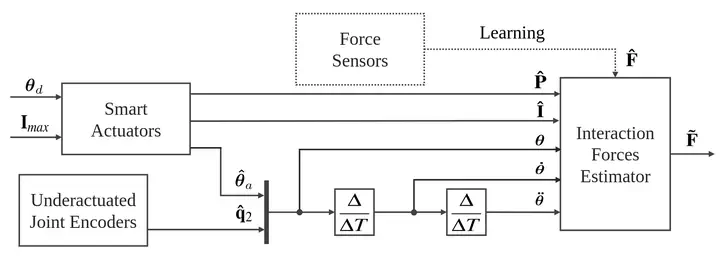
In physical Human–Robot Interaction (pHRI), forces exerted by humans need to be estimated to accommodate robot commands to human constraints, preferences, and needs. This paper presents a method for the estimation of the interaction forces between a human and a robot using a gripper with proprioceptive sensing. Specifically, we measure forces exerted by a human limb grabbed by an underactuated gripper in a frontal plane using only the gripper’s own sensors. This is achieved via a regression method, trained with experimental data from the values of the phalanx angles and actuator signals. The proposed method is intended for adaptive shared control in limb manipulation. Although adding force sensors provides better performance, the results obtained are accurate enough for this application. This approach requires no additional hardware; it relies uniquely on the gripper motor feedback—current, position and torque—and joint angles. Also, it is computationally cheap, so processing times are low enough to allow continuous human-adapted pHRI for shared control.
Type
Publication
In MDPI Sensors