MOCA-S: A Sensitive Mobile Collaborative Robotic Assistant exploiting Low-Cost Capacitive Tactile Cover and Whole-Body Control
Abstract
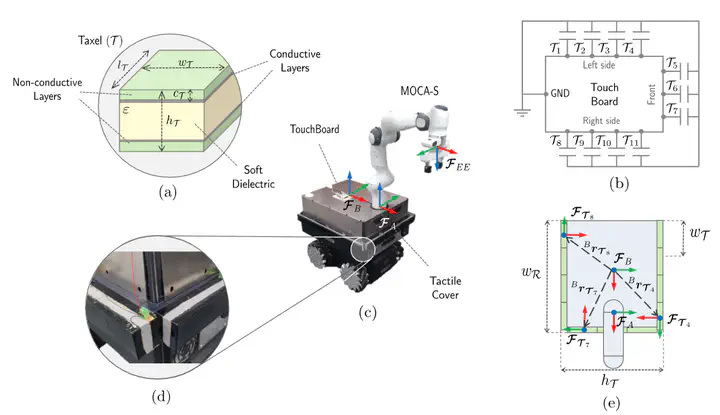
Safety is one of the most fundamental aspects of robotics, especially when it comes to collaborative robots (cobots) that are expected to physically interact with humans. Although a large body of literature has focused on safety-related aspects for fixed-based cobots, a low effort has been put into developing collaborative mobile manipulators. In response to this need, this work presents MOCA-S, i.e., Sensitive Mobile Collaborative Robotic Assistant, that integrates a low-cost, capacitive tactile cover to measure interaction forces applied to the robot base. The tactile cover comprises a set of 11 capacitive large-area tactile sensors distributed as a 1-D tactile array around the base. Characterization of the tactile sensors with different materials is included. Moreover, two expanded whole-body controllers that exploit the platform’s tactile cover and the loco-manipulation features are proposed. These controllers are tested in two experiments, demonstrating the potential of MOCA-S for safe physical Human-Robot Interaction (pHRI). Finally, an experiment is carried out in which an undesired collision occurs between MOCA-S and a human during a loco-manipulation task. The results demonstrate the intrinsic safety of MOCA-S and the proposed controllers, suggesting a new step towards creating safe mobile manipulators.
Type
Publication
In IEEE Robotics and Automation Letters