Enhancing Human-Robot Collaborative Transportation through Obstacle-Aware Vibrotactile Warning and Virtual Fixtures
Abstract
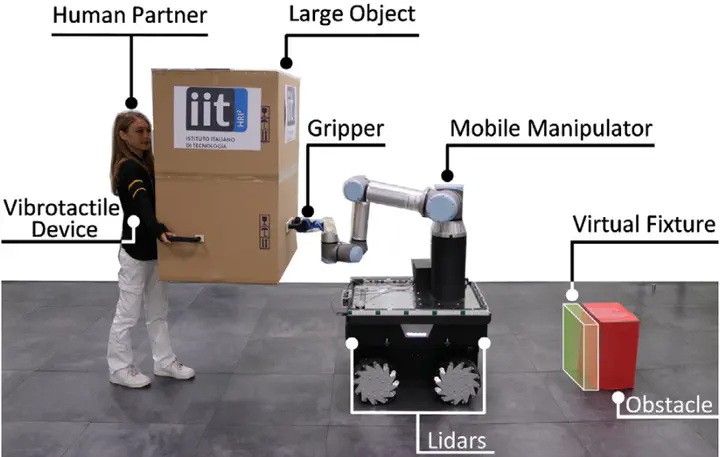
Transporting large and heavy objects can benefit from Human-Robot Collaboration (HRC), increasing the contribution of robots to our daily tasks and addressing challenges arising from labor shortages. This strategy typically positions the human collaborator as the leader, with the robot assuming the follower role. However, when transporting large objects, the operator's situational awareness can be compromised as the objects may occlude different parts of the environment, weakening the human leader's decision-making capacity and leading to failure due to collision. This paper proposes a situational awareness framework for collaborative transportation to face this challenge. The framework integrates a multi-modal haptic-based Obstacle Feedback Module with two units. The first unit consists of a warning module that alerts the operator through a haptic belt with four vibrotactile devices that provide feedback about the location and proximity of the obstacles. The second unit implements virtual fixtures as hard constraints for mobility. The warning feedback and the virtual fixtures act online based on the information given by two Lidars mounted on a mobile manipulator to detect the obstacles in the surroundings. By enhancing the operator's awareness of the environment, the proposed module improves the safety of the human-robot team in collaborative transportation scenarios by preventing collisions. Experiments with 16 non-expert subjects in four feedback modalities during four scenarios report an objective evaluation thanks to quantitative metrics and subjective evaluations based on user-level experiences. The results reveal the strengths and weaknesses of the implemented feedback modalities while providing solid evidence of the increased situational awareness of the operator when the two haptic units are employed.
Type
Publication
In Robotics and Autonomous Systems