The bridge between xsens motion-capture and robot operating system (ros): Enabling robots with online 3d human motion tracking
Abstract
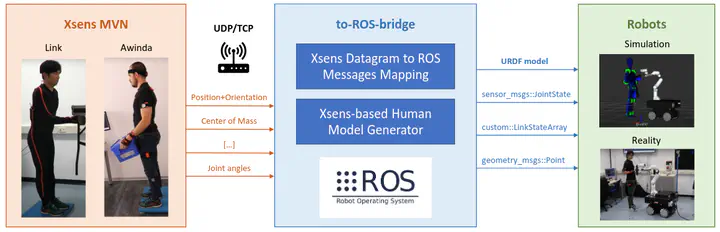
This document introduces the bridge between the leading inertial motion-capture systems for 3D human tracking and the most used robotics software framework. 3D kinematic data provided by Xsens are translated into ROS messages to make them usable by robots and a Unified Robotics Description Format (URDF) model of the human kinematics is generated, which can be run and displayed in ROS 3D visualizer, RViz. The code to implement the to-ROS-bridge is a ROS package called xsens_mvn_ros and is available on GitHub at [this URL](https://github.com/hrii-iit/xsens_mvn_ros) The main documentation can be found at [this URL](https://hrii-iit.github.io/xsens_mvn_ros/index.html).
Type
Publication
In arXiv