Juan M. Gandarias
Juan M. Gandarias
About
Projects
Publications
Teaching
Videos
Contact
CV
Conferences
Underactuated Gripper with Forearm Roll Estimation for Human Limbs Manipulation in Rescue Robotics
The emergence of new robotic technologies such as compliant control and soft robotics, has contributed to safe physical Human-Robot …
Juan M. Gandarias
,
Francisco Pastor
,
Antonio J. Muñoz-Ramírez
,
Alfonso J. García-Cerezo
,
Jesús M. Gómez-De-Gabriel
PDF
Cite
Slides
Video
DOI
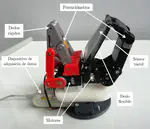
Diseño de una pinza subactuada híbrida soft-rigid con sensores hápticos para interacción física segura robot-humano
Underactuated robotic hands or grippers is one of the greatest achievements in robotic manipulation of the last years due to the …
Trinidad Sánchez-Montoya
,
Juan M. Gandarias
,
Francisco Pastor
,
Antonio J. Muñoz-Ramírez
,
Alfonso J. García-Cerezo
,
Jesús M. Gómez-De-Gabriel
PDF
Cite
Poster
DOI
Methods for Autonomous Wristband Placement with a Search-and-Rescue Aerial Manipulator
A new robotic system for Search And Rescue (SAR) operations based on the automatic wristband placement on the victims’ arm, which may …
Jesus M. Gomez-De-Gabriel
,
Juan M. Gandarias
,
Francisco J. Perez-Maldonado
,
Francisco J. García-Nuñez
,
Emilio J. Fern ́Andez-García
,
Alfonso J. García-Cerezo
PDF
Cite
Slides
DOI
Monitorización de víctimas con manipuladores aéreos en operaciones de búsqueda y rescate
This paper presents the first victim monitoring device for automatic placement of victims with aerial robotic manipulators. It is a …
Francisco J. Ruiz-Ruiz,
,
Juan M. Gandarias
,
Antonio J. Muñoz-Ramírez
,
Alfonso J. García-Cerezo
,
Francisco Pastor-Martín
,
Jesús M. Gómez-De-Gabriel
PDF
Cite
Poster
DOI
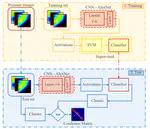
Human and object recognition with a high-resolution tactile sensor
This paper describes the use of two artificial intelligence methods for object recognition via pressure images from a high-resolution …
Juan M. Gandarias
,
Jesus M. Gomez-De-Gabriel
,
Alfonso J. Garcia-Cerezo
PDF
Cite
Poster
DOI
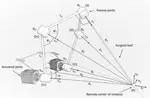
Cinematica y prototipado de un manipulador paralelo con centro de rotacion remoto para robotica quirurgica
This paper presents the kinematic model of a parallel robot and the construction of a prototype with 2 DoFs, whose purpose is to serve …
Francisco Pastor
,
Juan M. Gandarias
,
Jesus M. Gomez-De-Gabriel
PDF
Cite
Poster
DOI
Clasificacion de la información tactil para la deteccion de personas
This paper presents the design of a tactile end-effector (EE) and the application of artificial intelligence techniques for human …
Juan M. Gandarias
,
Jesus M. Gomez-De-Gabriel
,
Alfonso J. Garcia-Cerezo
PDF
Cite
Poster
DOI
Uso del Haptic Paddle con aprendizaje basado en proyectos
This paper presents the experience of the educational use of a haptic device developed as a new version of the Haptic Paddle, created …
Juan M. Gandarias
,
Antonio J. Munoz-Ramirez
,
Jesus M. Gomez-De-Gabriel
PDF
Cite
Poster
DOI
Diseño y uso de una paleta haptica para practicas de teleoperacion con simulink
In developing laboratory practices in some courses related to systems engineering and automation, students are expected to gather …
Antonio J. Muñoz-Ramírez
,
Jesús M. Gómez-De-Gabriel
,
Juan M. Gandarias
,
José Cádenas
,
Jaime Molina
,
Anthony Mandow
PDF
Cite
Video
DOI
Diseño y uso de una paleta haptica para practicas de teleoperacion con simulink
En este artículo se presenta el uso de dispositivos de realimentación de fuerzas de un grado de libertad como herramienta para el …
Juan M. Gandarias
,
Sepehr Akbari-Kalhor
,
Jesus M. Gomez-De-Gabriel
PDF
Cite
Video
DOI
»
Cite
×