Juan M. Gandarias
Juan M. Gandarias
About
Projects
Publications
Teaching
Events
Videos
Contact
CV
Journal
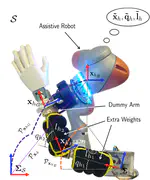
SUPER-MAN: SUPERnumerary Robotic Bodies for Physical Assistance in HuMAN-Robot Conjoined Actions
This paper presents a mobile supernumerary robotic approach to physical assistance in human-robot conjoined actions. The study starts …
Alberto Giammarino
,
Juan M. Gandarias
,
Pietro Balatti
,
Marta Lorenzini
,
Mattia Leonori
,
Arash Ajoudani
PDF
Cite
Video
DOI
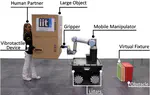
Enhancing Human-Robot Collaborative Transportation through Obstacle-Aware Vibrotactile Warning and Virtual Fixtures
Transporting large and heavy objects can benefit from Human-Robot Collaboration (HRC), increasing the contribution of robots to our …
Doganay Sirintuna
,
Theodora Kastritsi
,
Idil Ozdamar
,
Juan M. Gandarias
,
Arash Ajoudani
PDF
Cite
Video
DOI
Toward Sustainable Haptics: A Wearable Vibrotactile Solar-Powered System with Biodegradable Components
Electronics and mechatronics waste is an exponentially increasing environmental issue, especially for wearable devices, due to their …
Robin Arbaud
,
Maedeh Najafi
,
Juan M. Gandarias
,
Marta Lorenzini
,
Uttam C. Paul
,
Arkadiusz Zych
,
Athanassia Athanassiou
,
Pietro Cataldi
,
Arash Ajoudani
PDF
Cite
DOI
Toward an active omnilateral walking support robotic system
In this work, we presented a prototype of the omnilateral walking support robotic system and we designed an admittance controller based …
Andrea Fortuna
,
Younggeol Cho
,
Pietro Balatti
,
Juan M. Gandarias
,
Mattia Leonori
,
Marta Lorenzini
,
Elena De Momi
,
Arash Ajoudani
PDF
Cite
DOI
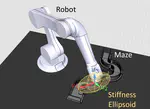
A Self-Tuning Impedance-based Interaction Planner for Robotic Haptic Exploration
This paper presents a novel interaction planning method that exploits impedance tuning techniques in response to environmental …
Yasuhiro Kato
,
Pietro Balatti
,
Juan M. Gandarias
,
Mattia Leonori
,
Toshiaki Tsuji
,
Arash Ajoudani
PDF
Cite
Video
DOI
A Hybrid Learning and Optimization Framework to Achieve Physically Interactive Tasks with Mobile Manipulators
This paper proposes a hybrid learning and optimization framework for mobile manipulators for complex and physically interactive tasks. …
Jianzhuang Zhao
,
Alberto Giammarino
,
Edoardo Lamon
,
Juan M. Gandarias
,
Elena De Momi
,
Arash Ajoudani
PDF
Cite
Video
DOI
MOCA-S: A Sensitive Mobile Collaborative Robotic Assistant exploiting Low-Cost Capacitive Tactile Cover and Whole-Body Control
Safety is one of the most fundamental aspects of robotics, especially when it comes to collaborative robots (cobots) that are expected …
Juan M. Gandarias
,
Mattia Leonori
,
Arash Ajoudani
PDF
Cite
Video
DOI
A Directional Vibrotactile Feedback Interface for Ergonomic Postural Adjustment
The objective of this paper is to develop and evaluate a directional vibrotactile feedback interface as a guidance tool for postural …
Wansoo Kim
,
Virginia Ruiz
,
Juan M. Gandarias
,
Marta Lorenzini
,
Arash Ajoudani
PDF
Cite
DOI
Upper-Limb Kinematic Parameter Estimation and Localization using a Compliant Robotic Manipulator
Assistive and rehabilitation robotics have gained momentum over the past decade and are expected to progress significantly in the …
Francisco J. Ruiz-Ruiz
,
Juan M. Gandarias
,
Francisco Pastor
,
Jesús M. Gómez-De-Gabriel
PDF
Cite
Video
DOI
Bayesian and Neural Inference on LSTM-based Object Recognition from Tactile and Kinesthetic Information
Recent advances in the field of intelligent robotic manipulation pursue providing robotic hands with touch sensitivity. Haptic …
Francisco Pastor
,
Jorge García-González
,
Juan M. Gandarias
,
Daniel Medina
,
Pau Closas
,
Alfonso J. García-Cerezo
,
Jesús M. Gómez-De-Gabriel
PDF
Cite
Video
DOI
»
Cite
×