Juan M. Gandarias
Juan M. Gandarias
About
Projects
Publications
Teaching
Events
Videos
Contact
CV
Journal
Multimodal haptic object recognition: Can kinesthetic inference compensate for the lack of tactile sensing resolution?
Haptic perception arises from the integration of cutaneous and kinesthetic cues, yet achieving human‑level tactile performance in …
Francisco Pastor
,
Da-Hui Lin-Yang
,
Alfonso J. García-Cerezo
,
Juan M. Gandarias
PDF
Cite
DOI
Goodness of Fit in the Marginal Modeling of Round-Trip Times for Networked Robot Sensor Transmissions
When complex computations cannot be performed on board a mobile robot, sensory data must be transmitted to a remote station to be …
Juan-Antonio Fernández-Madrigal
,
Vicente Arévalo-Espejo
,
Ana Cruz-Martín
,
Cipriano Galindo-Andrades
,
Adrián Bañuls-Arias
,
Juan M. Gandarias
PDF
Cite
DOI
In-Band Medium-Frequency R-Mode Signal Quality Estimation
Assessing the quality of a received signal is of fundamental importance to predict the performance of the receiver. In general, the …
Filippo Giacomo Rizzi
,
Lars Grundhöfer
,
Niklas Hehenkamp
,
Stefan Gewies
,
Daniel Medina
,
Juan M. Gandarias
PDF
Cite
Video
DOI
SUPER-MAN: SUPERnumerary Robotic Bodies for Physical Assistance in HuMAN-Robot Conjoined Actions
This paper presents a mobile supernumerary robotic approach to physical assistance in human-robot conjoined actions. The study starts …
Alberto Giammarino
,
Juan M. Gandarias
,
Pietro Balatti
,
Marta Lorenzini
,
Mattia Leonori
,
Arash Ajoudani
PDF
Cite
Video
DOI
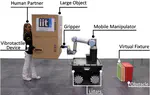
Enhancing Human-Robot Collaborative Transportation through Obstacle-Aware Vibrotactile Warning and Virtual Fixtures
Transporting large and heavy objects can benefit from Human-Robot Collaboration (HRC), increasing the contribution of robots to our …
Doganay Sirintuna
,
Theodora Kastritsi
,
Idil Ozdamar
,
Juan M. Gandarias
,
Arash Ajoudani
PDF
Cite
Video
DOI
Toward Sustainable Haptics: A Wearable Vibrotactile Solar-Powered System with Biodegradable Components
Electronics and mechatronics waste is an exponentially increasing environmental issue, especially for wearable devices, due to their …
Robin Arbaud
,
Maedeh Najafi
,
Juan M. Gandarias
,
Marta Lorenzini
,
Uttam C. Paul
,
Arkadiusz Zych
,
Athanassia Athanassiou
,
Pietro Cataldi
,
Arash Ajoudani
PDF
Cite
DOI
Toward an active omnilateral walking support robotic system
In this work, we presented a prototype of the omnilateral walking support robotic system and we designed an admittance controller based …
Andrea Fortuna
,
Younggeol Cho
,
Pietro Balatti
,
Juan M. Gandarias
,
Mattia Leonori
,
Marta Lorenzini
,
Elena De Momi
,
Arash Ajoudani
PDF
Cite
DOI
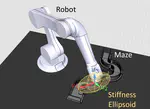
A Self-Tuning Impedance-based Interaction Planner for Robotic Haptic Exploration
This paper presents a novel interaction planning method that exploits impedance tuning techniques in response to environmental …
Yasuhiro Kato
,
Pietro Balatti
,
Juan M. Gandarias
,
Mattia Leonori
,
Toshiaki Tsuji
,
Arash Ajoudani
PDF
Cite
Video
DOI
A Hybrid Learning and Optimization Framework to Achieve Physically Interactive Tasks with Mobile Manipulators
This paper proposes a hybrid learning and optimization framework for mobile manipulators for complex and physically interactive tasks. …
Jianzhuang Zhao
,
Alberto Giammarino
,
Edoardo Lamon
,
Juan M. Gandarias
,
Elena De Momi
,
Arash Ajoudani
PDF
Cite
Video
DOI
MOCA-S: A Sensitive Mobile Collaborative Robotic Assistant exploiting Low-Cost Capacitive Tactile Cover and Whole-Body Control
Safety is one of the most fundamental aspects of robotics, especially when it comes to collaborative robots (cobots) that are expected …
Juan M. Gandarias
,
Mattia Leonori
,
Arash Ajoudani
PDF
Cite
Video
DOI
»
Cite
×