Juan M. Gandarias
Juan M. Gandarias
About
Projects
Publications
Teaching
Events
Videos
Contact
CV
Journal
Proprioceptive estimation of forces using underactuated fingers for Robot-Initiated pHRI
In physical Human–Robot Interaction (pHRI), forces exerted by humans need to be estimated to accommodate robot commands to human …
Joaquín Ballesteros
,
Francisco Pastor
,
Jesús M. Gómez-De-Gabriel
,
Juan M. Gandarias
,
Alfonso J. García-Cerezo
,
Cristina Urdiales
PDF
Cite
DOI
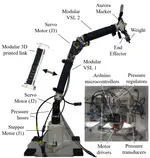
Open-loop position control in collaborative, modular Variable-Stiffness-Link (VSL) robots
Collaborative robots open up new avenues in the field of industrial robotics and physical Human-Robot Interaction (pHRI) as they are …
Juan M. Gandarias
,
Yongjing Wang
,
Agostino Stilli
,
Alfonso J. García-Cerezo
,
Jesús M. Gómez-De-Gabriel
,
Helge A. Wurdemann
PDF
Cite
DOI
Using 3D Convolutional Neural Networks for Tactile Object Recognition with Robotic Palpation
In this paper, a novel method of active tactile perception based on 3D neural networks and a high-resolution tactile sensor installed …
Francisco Pastor
,
Juan M. Gandarias
,
Alfonso J. García-Cerezo
,
Jesús M. Gómez-De-Gabriel
PDF
Cite
DOI
CNN-based Methods for Object Recognition with High-Resolution Tactile Sensors
Novel high-resolution pressure-sensor arrays allow treating pressure readings as standard images. Computer vision algorithms and …
Juan M. Gandarias
,
Alfonso J. García-Cerezo
,
Jesús M. Gómez-De-Gabriel
PDF
Cite
DOI
Enhancing Perception with Tactile Object Recognition in Adaptive Grippers for Human–Robot Interaction
The use of tactile perception can help first response robotic teams in disaster scenarios, where visibility conditions are often …
Juan M. Gandarias
,
Jesús M. Gómez-De-Gabriel
,
Alfonso J. García-Cerezo
PDF
Cite
DOI
«
Cite
×