Juan M. Gandarias
Juan M. Gandarias
About
Projects
Publications
Teaching
Events
Videos
Contact
CV
PHRI
A Multipurpose Interface for Close- and Far-Proximity Control of Mobile Collaborative Robots
This letter introduces an innovative visuo-haptic interface to control Mobile Collaborative Robots (MCR). Thanks to a passive …
Hamidreza Raei
,
Juan M. Gandarias
,
Elena De Moni
,
Pietro Balatti
,
Arash Ajoudani
PDF
Cite
Code
Video
DOI
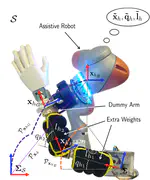
SUPER-MAN: SUPERnumerary Robotic Bodies for Physical Assistance in HuMAN-Robot Conjoined Actions
This paper presents a mobile supernumerary robotic approach to physical assistance in human-robot conjoined actions. The study starts …
Alberto Giammarino
,
Juan M. Gandarias
,
Pietro Balatti
,
Marta Lorenzini
,
Mattia Leonori
,
Arash Ajoudani
PDF
Cite
Video
DOI
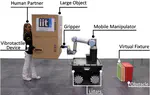
Enhancing Human-Robot Collaborative Transportation through Obstacle-Aware Vibrotactile Warning and Virtual Fixtures
Transporting large and heavy objects can benefit from Human-Robot Collaboration (HRC), increasing the contribution of robots to our …
Doganay Sirintuna
,
Theodora Kastritsi
,
Idil Ozdamar
,
Juan M. Gandarias
,
Arash Ajoudani
PDF
Cite
Video
DOI
A Personalizable Controller for the Walking Assistive omNi-Directional Exo-Robot (WANDER)
Preserving and encouraging mobility in the elderly and adults with chronic conditions is of paramount importance. However, existing …
Andrea Fortuna
,
Marta Lorenzini
,
Mattia Leonori
,
Juan M. Gandarias
,
Pietro Balatti
,
Younggeol Cho
,
Elena De Momi
,
Arash Ajoudani
PDF
Cite
DOI
Robot-Assisted Navigation for Visually Impaired through Adaptive Impedance and Path Planning
This paper presents a framework to navigate visually impaired people through unfamiliar environments by means of a mobile manipulator. …
Pietro Balatti
,
Idil Ozdamar
,
Doganay Sirintuna
,
Luca Fortini
,
Mattia Leonori
,
Juan M. Gandarias
,
Arash Ajoudani
PDF
Cite
Video
DOI
Toward an active omnilateral walking support robotic system
In this work, we presented a prototype of the omnilateral walking support robotic system and we designed an admittance controller based …
Andrea Fortuna
,
Younggeol Cho
,
Pietro Balatti
,
Juan M. Gandarias
,
Mattia Leonori
,
Marta Lorenzini
,
Elena De Momi
,
Arash Ajoudani
PDF
Cite
DOI
MOCA-S: A Sensitive Mobile Collaborative Robotic Assistant exploiting Low-Cost Capacitive Tactile Cover and Whole-Body Control
Safety is one of the most fundamental aspects of robotics, especially when it comes to collaborative robots (cobots) that are expected …
Juan M. Gandarias
,
Mattia Leonori
,
Arash Ajoudani
PDF
Cite
Video
DOI
Improving Standing Balance Performance through the Assistance of a Mobile Collaborative Robot
This paper presents the design and development of a robotic system to give physical assistance to the elderly or people with …
Francisco J. Ruiz-Ruiz
,
Alberto Giammarino
,
Marta Lorenzini
,
Juan M. Gandarias
,
Jesús M. Gómez-De-Gabriel
,
Arash Ajoudani
PDF
Cite
Video
DOI
Enhancing Flexibility and Adaptability in Conjoined Human-Robot Industrial Tasks with a Minimalist Physical Interface
This paper presents a physical interface for collaborative mobile manipulators in industrial manufacturing and logistics applications. …
Juan M. Gandarias
,
Pietro Balatti
,
Edoardo Lamon
,
Marta Lorenzini
,
Arash Ajoudani
PDF
Cite
Video
DOI
Upper-Limb Kinematic Parameter Estimation and Localization using a Compliant Robotic Manipulator
Assistive and rehabilitation robotics have gained momentum over the past decade and are expected to progress significantly in the …
Francisco J. Ruiz-Ruiz
,
Juan M. Gandarias
,
Francisco Pastor
,
Jesús M. Gómez-De-Gabriel
PDF
Cite
Video
DOI
»
Cite
×