Juan M. Gandarias
Juan M. Gandarias
About
Projects
Publications
Teaching
Events
Videos
Contact
CV
Spanish
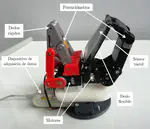
Diseño de una pinza subactuada híbrida soft-rigid con sensores hápticos para interacción física segura robot-humano
Underactuated robotic hands or grippers is one of the greatest achievements in robotic manipulation of the last years due to the …
Trinidad Sánchez-Montoya
,
Juan M. Gandarias
,
Francisco Pastor
,
Antonio J. Muñoz-Ramírez
,
Alfonso J. García-Cerezo
,
Jesús M. Gómez-De-Gabriel
PDF
Cite
Poster
DOI
Monitorización de víctimas con manipuladores aéreos en operaciones de búsqueda y rescate
This paper presents the first victim monitoring device for automatic placement of victims with aerial robotic manipulators. It is a …
Francisco J. Ruiz-Ruiz,
,
Juan M. Gandarias
,
Antonio J. Muñoz-Ramírez
,
Alfonso J. García-Cerezo
,
Francisco Pastor-Martín
,
Jesús M. Gómez-De-Gabriel
PDF
Cite
Poster
DOI
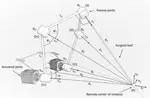
Cinematica y prototipado de un manipulador paralelo con centro de rotacion remoto para robotica quirurgica
This paper presents the kinematic model of a parallel robot and the construction of a prototype with 2 DoFs, whose purpose is to serve …
Francisco Pastor
,
Juan M. Gandarias
,
Jesus M. Gomez-De-Gabriel
PDF
Cite
Poster
DOI
Clasificacion de la información tactil para la deteccion de personas
This paper presents the design of a tactile end-effector (EE) and the application of artificial intelligence techniques for human …
Juan M. Gandarias
,
Jesus M. Gomez-De-Gabriel
,
Alfonso J. Garcia-Cerezo
PDF
Cite
Poster
DOI
Uso del Haptic Paddle con aprendizaje basado en proyectos
This paper presents the experience of the educational use of a haptic device developed as a new version of the Haptic Paddle, created …
Juan M. Gandarias
,
Antonio J. Munoz-Ramirez
,
Jesus M. Gomez-De-Gabriel
PDF
Cite
Poster
DOI
Diseño y uso de una paleta háptica para prácticas de teleoperación con simulink
This paper presents the use of 1 DoF force feedback devices as a tool for the development of teaching applications in teleoperation and …
Juan M. Gandarias
,
Sepehr Akbari-Kalhor
,
Jesus M. Gomez-De-Gabriel
PDF
Cite
Video
DOI
Uso de Google Classroom como repositorio de rob´otica pr´actica: PieroAcademy
In developing laboratory practices in some courses related to systems engineering and automation, students are expected to gather …
Antonio J. Muñoz-Ramírez
,
Jesús M. Gómez-De-Gabriel
,
Juan M. Gandarias
,
José Cádenas
,
Jaime Molina
,
Anthony Mandow
PDF
Cite
Video
DOI
Cite
×